深度增强学习和 DQN
当系统状态 S 很多时,比如围棋、游戏,Tabular 的 Q-learning 方法就无法实现了。这时,我们需要用深度学习模型,获得关于系统状态的深度模型。这就是深度增强学习。
具体来说,我们把 S 映射到向量上,把 Q 变成它的函数,然后用梯度下降的方法进行优化。这就是 Gradient Q-learning。当我们用神经元网络近似时,模型的非线性使模型的收敛并不容易,因此,我们通过 Experience Replay 和 Target Network 两个方法来训练它。这就是 Deep Q-Network(DQN)。DQN 成功地解决了各种我们熟悉的街机游戏(比如坦克大战)的问题。
Gradient Q-Learning
当 S 很多时,怎么办呢?比如围棋,有 \(3^{361}\) 种状态,或者游戏:它的界面图像有无数种状态。
这时,我们要把 s 和 a 映射到向量上,然后把 Q 变成它们的函数,用神经元网络近似,这就是 Gradient Q-Learning。它的算法如下图所示:
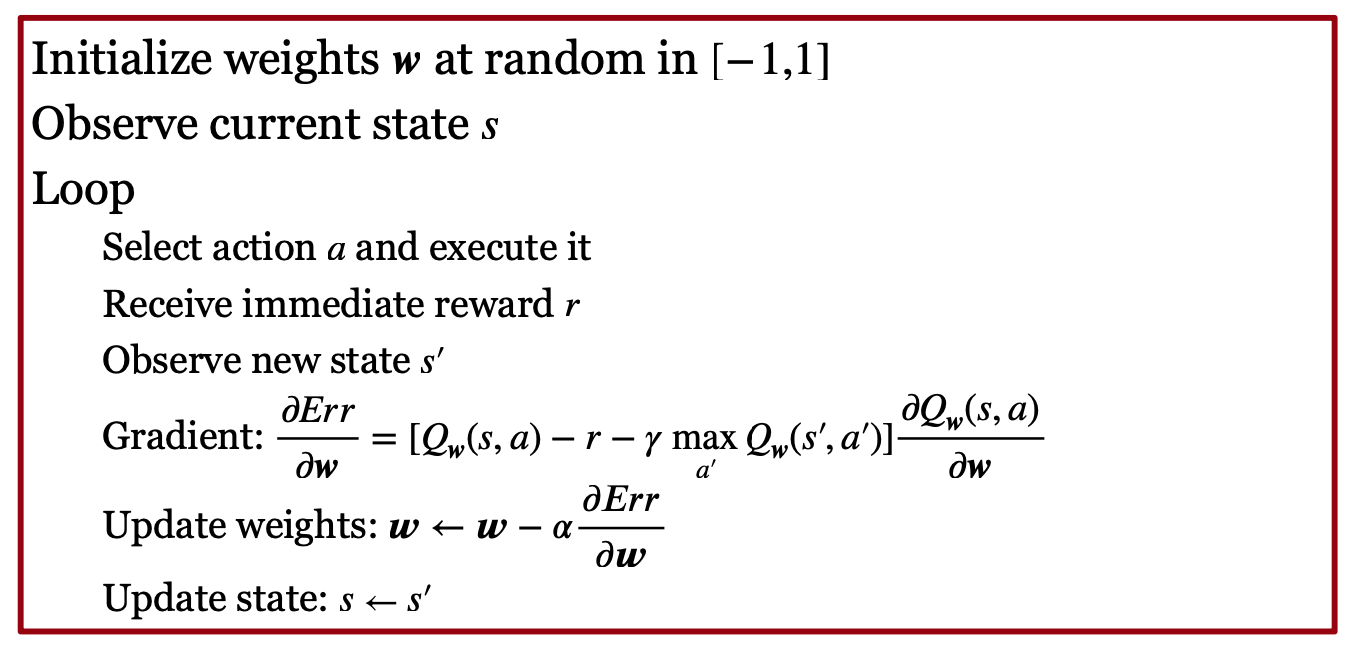
如上图所示,我们还是像 Q-Learning 那样,在当前状态 s 下,根据策略,执行动作 a 之后,用下一个进入的状态的 s‘ 的各个 Action 中的最大 Q 值,经过衰减后,加上这次执行 a 获得的 Reward r,用它来近似 s 的 Q 函数。因此,近似误差就是它与真正的 Q 函数之间的 MSE。这就是神经元网络的 Loss 函数。将它对 w 求导,就得到了梯度,然后进行梯度下降,优化模型参数 w。
非线性 Gradient Q-Learning 会不收敛。直觉上,这是因为通过调整 w 来增加一对 s 和 a 的 Q 函数,不可避免地会影响这对 s 和 a 的邻居的 Q 函数。为此,实际中,我们有两个技巧来减少它跑飞(Divergence):
第一个技巧是 Experience Replay。它把很多历史的经验 <s,a,s’,a’> 先存下来。然后在训练时,从中随机地选取一批数据,基于它们进行训练。这种方法也叫 Replay buffers。这是因为连续实验时,相邻的样本之间会相关。因此,不能依靠连续的样本来训练。用 Replay Buffers 能够打破这种相关。
第二个技巧是 Target Network。它用一个另外的“目标网络”,周期地提取一个历史经验 <s,a,s’,a’> 的 mini-batch,对它进行梯度更新。这是因为我们做 Online Q 函数的迭代时,Q 函数一直在变化,这时,我们用 Replay Buffer 中的以前的数据来训练,这些数据和最新的模型就对不上。所以,我们新加一个不经常更新的“目标网络”。这样能够改进模型训练的稳定性。
上面两个技巧的部分内容,请参考伯克利 CS182 的 PPT。
我们把深度神经元网络、Experience Replay、Target Network 用于 Gradient Q-Learning,这就是 DeepMind 提出的 Deep Q-network(DQN)。这个方法打游戏特别好用,比如我们熟悉的街机小游戏。
DQN 的算法如下图所示:
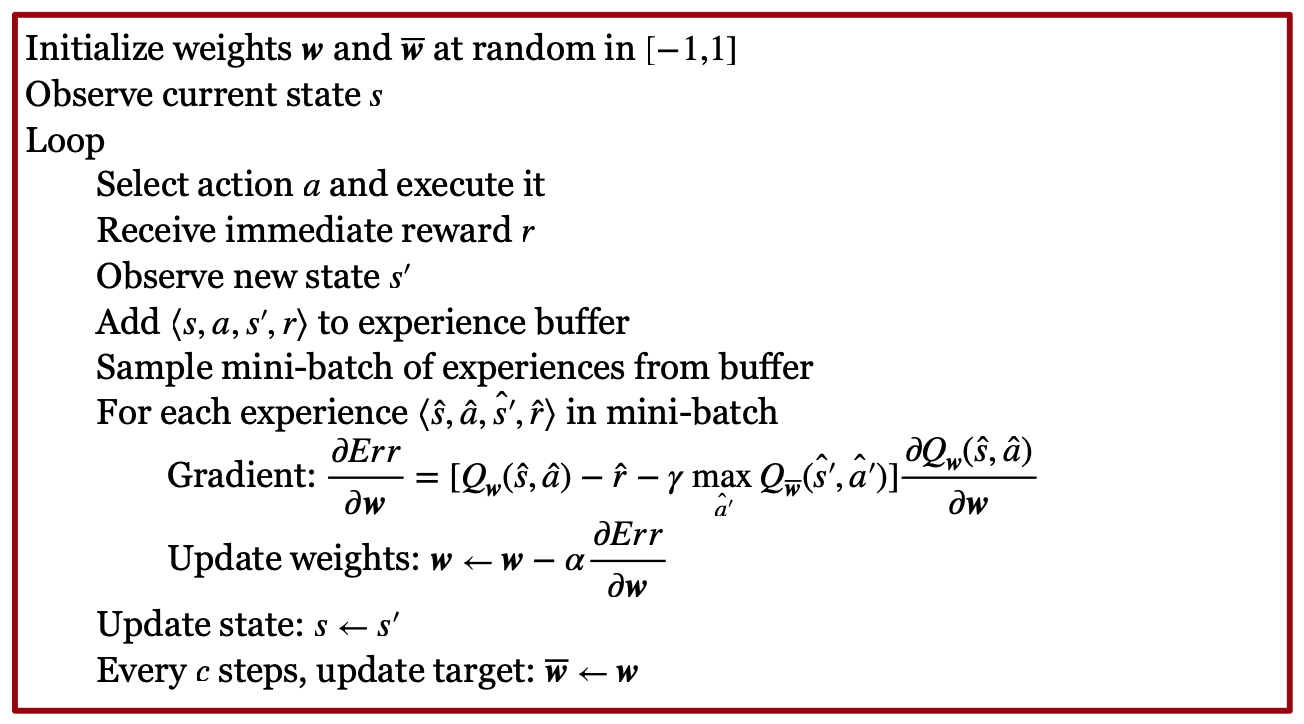
如上图所示,它和 Tabular Q-Learning 类似,但是加入了 Experience Replay 和 Target Network。
DeepMind 用于打游戏的 DQN 网络的结构如下:它首先通过 CNN 得到游戏状态(即界面上的图像显示)的深度表征,然后用“全联通网络”将其映射为游戏的操作动作。然后整个算法通过上述算法进行优化,取得了非常好的效果。
实现
对 DQN 的应用,伯克利 CS182 的 PPT 有以下建议:
首先,对连续 Action,有下面两方面建议:
第一,在深度模型的设计上,对连续 Action,我们可以把 S 和 a 输入深度学习模型,输出 Q 值;对离散 Action,我们可以输入 S,然后用多任务输出:每个 Action 输出一个 Q 值。
第二,在算法选择上,对连续 Action,我们用 DQN 选择 Action 进行实验时,可以选择的值太多了。此时,我们可以用后面将要学习的 AC 算法,只是把 AC 算法的 V 函数换成 Q 函数。这样来做,比较简单。
然后,在训练的过程中,因为模型不容易收敛,所以需要小心的编码。建议先在一个容易的、可靠的任务上先实验评估,确保自己的代码是对的,然后再在自己的复杂任务上跑算法。
此外,采用大一点的 Replay buffer 会帮助改进稳定性。
然后,训练刚开始的时候,模型很可能表现很差,就像随机工作似的。这时不要着急。它很可能后面就会找到突破口,然后有好的表现。
最后,可以刚开始用较高的探索(epsilon),然后逐渐减少。
示例
我们介绍两个例子:
最著名的例子是上面提到的 DeepMind 的例子。这是 2013 年 DeepMind 的《Human-level control through deep reinforcement learning》工作。它解决了采用 Q-learning with CNN,使用了 replay buffer,target network、One-step backup、One gradient step 等技巧,后续还可以被 double Q-learning 等各种技巧改进。
伯克利 CS182 还提到作者的一个例子《QT-Opt: Scalable Deep Reinforcement Learning of Vision-Based Robotic Manipulation Skills》,它能够控制机器人,做大规模的 Q Learning。
课程材料
- 滑铁卢大学 CS486 人工智能 Deep Reinforcement Learning slides
- 伯克利 CS182 深度学习,Actor Critic PPT,B 站视频,讨论材料 9
- Berkeley CS285 Lec 8: Deep RL with Q-Functions, slides, Youtube Video
- Stanford CS234 RL Lecture 5/6: RL with function approximation
- Silver RL 2015 Lec 6: Value Function Approximation website, video
- DeepMind UCL Hadovan RL 2021 Lec 7 Function approximation in reinforcement learning
课本材料
- Deep Reinforcement Learning (slides , annotated slides)
- [GBC] Chap. 6,7,8
- [SutBar] Sec. 9.3, 9.4, 9.6, 9.7
- [Sze] Sec. 4.3.2
练习
- 上海交大伯禹增强学习 练习 第7章-DQN算法.ipynb
- 上海交大伯禹增强学习 练习 第8章-DQN改进算法.ipynb
- Denny Britz + Silver RL 2015 Lab 6
- 伯克利 RL bootcamp 2017 Lab 2 Chainer,Lab 3 DQN
- 伯克利 CS182 DL MuJoCo implement Imitation learning, Policy Gradients, DQN, and Actor Critic algorithms.
- Stanford CS234 DRL Assignment 2 DQN
- 滑铁卢 CS486 练习 4
- DQN 练习:Part 3: DQN implementation - dqn_agent.py
- Part 3: Main script to run DQN implementation - main.py
- CS885 练习 1,CartPole DQN
- Berkeley DeepRL Camp Lab 3: Deep Q-Learning. You will implement the DQN algorithm and apply it to Atari games. website
- CartPole 问题,修改代码,更改“目标网络”的更新频率、样本mini-batch数目:
- 问题描述:https://www.gymlibrary.dev/environments/classic_control/cart_pole/
- 代码描述: https://blog.gofynd.com/building-a-deep-q-network-in-pytorch-fa1086aa5435
论文
DRL 是目前的研究热点。因此,我们可以读最新的学术论文,获得更深的理解:
下面是斯坦福 CS 224R 提到的论文:
Q-Learning
- Playing Atari with Deep Reinforcement Learning. Mnih et al. (2013)
Practical Deep RL Implementation Techniques
- Deep Reinforcement Learning with Double Q-learning. Hasselt et al. (2015)
- QT-Opt: Scalable Deep Reinforcement Learning for Vision-Based Robotic Manipulation. Kalashnikov et al. (2018)
- Large-scale Q-learning with continuous actions (QT-Opt)
- Based Robotic Manipulation Skills
下面是伯克利 DRL 课程提到的论文:
Classic papers
- Watkins. (1989). Learning from delayed rewards: introduces Q-learning
- Riedmiller. (2005). Neural fitted Q-iteration: batch-mode Q-learning with neural networks
Q-learning papers
- Lange, Riedmiller. (2010). Deep auto-encoder neural networks in reinforcement learning: early image-based Q-learning method using autoencoders to construct embeddings
- Mnih et al. (2013). Human-level control through deep reinforcement learning: Q- learning with convolutional networks for playing Atari.
- Van Hasselt, Guez, Silver. (2015). Deep reinforcement learning with double Q-learning: a very effective trick to improve performance of deep Q-learning.
- Lillicrap et al. (2016). Continuous control with deep reinforcement learning: continuous Q-learning with actor network for approximate maximization.
- Gu, Lillicrap, Stuskever, L. (2016). Continuous deep Q-learning with model-based acceleration: continuous Q-learning with action-quadratic value functions.
- Wang, Schaul, Hessel, van Hasselt, Lanctot, de Freitas (2016). Dueling network architectures for deep reinforcement learning: separates value and advantage estimation in Q-function.
Q-learning on a real robot
- “Robotic manipulation with deep reinforcement learning and …,” Gu, Holly, et al. ‘17
- Continuous actions with NAF (quadratic in actions)
- Uses replay buffer and target network
- One-step backup
- Four gradient steps per simulator step for efficiency
- Parallelized across multiple robots
Q-learning with continuous actions
- “Continuous control with deep reinforcement learning,” Lillicrap et al. ‘15
- Continuous actions with maximizer network
- Uses replay buffer and target network (with Polyak averaging)
- One-step backup
- One gradient step per simulator step
Fitted Q-iteration in a latent space
- “Autonomous reinforcement learning from raw visual data,” Lange & Riedmiller ‘12
- Q-learning on top of latent space learned with autoencoder
- Uses fitted Q-iteration
- Extra random trees for function approximation (but neural net for embedding)
| Index | Previous | Next |