视觉机器人
工业机器人
我们接下来看看视觉机器人的应用。下面是一个工业机器人的动画。
如上图所示,这个工业机器人能够通过识别物体,然后控制机械手,将其移动到指定的位置。这个过程是基于视觉技术实现的。其中包含两个关键步骤:
首先,它需要完成“实例分割”的任务。也就是说,机器人通过视频识别图像中的各个物体,例如螺栓,并将它们从背景中分割出来。这样,它就能够确定螺栓的位置和形状。
接下来,机器人会控制其机械手臂进行操作。通过视觉监控系统的辅助,机械手臂可以精准地抓取螺栓,并将其放置到指定的位置。整个过程依赖于视觉信号的实时分析与反馈,最终实现了高效的自动化操作。
自动驾驶
目前,基于视觉的自动驾驶系统正在普及。这些系统采用了实时语义分割技术。比如,当你购买一辆带有摄像头的智能汽车时,其内部实际上配备了强大的处理器,能够识别道路标线、前方物体和交通标志等。下图是一辆行驶在道路上的汽车看到的场景的实例分割效果。

这些视觉信息通过复杂的算法被处理后,用于控制方向盘、刹车和油门,仅靠这三个控制点即可实现自动驾驶功能。2016年,英伟达(NVIDIA)在乡间小路上展示了一款基于人工智能的自动驾驶系统。系统在试验中会犯错误,但它通过学习逐渐改进,就像人类儿童从错误中学习一样。目前,华为在无人驾驶领域也取得了很好的成绩。现在售价15万元以下的汽车都已经配备了摄像头,具备基本的视觉功能,为未来的自动驾驶奠定了基础。
基于视觉的自动驾驶技术在实际中也有一些挑战。比如在不同天气条件下的表现。例如,交通标志可能被雨雪遮挡,或者在阳光背光的情况下,识别效果会变差。如下图所示。
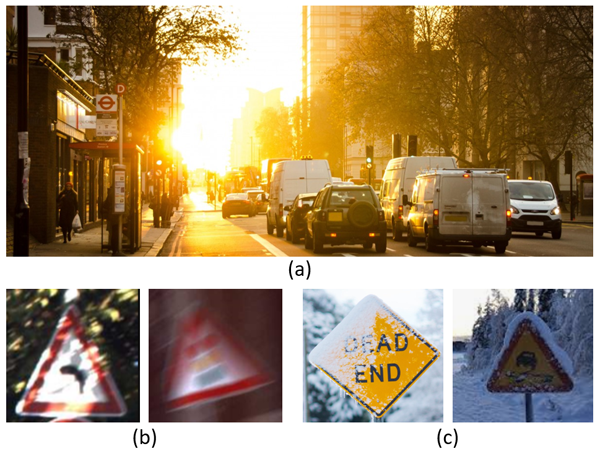
这些都是现实中遇到的问题,需要通过改进算法和技术来应对这些挑战
家用和流水线机器人
随着老龄化的严重,家用机器人有着越来越多的需求。2010 年,有研究者就演示了一个折毛巾的家用机器人。这个机器人也是基于视觉技术的。它配备了两个摄像头,用来识别和寻找物体的角落。例如,它可以找到毛巾的角,并且在找到之后,它会自动帮你叠起来。
这种识别过程其实并不简单,因为毛巾角的颜色和形状较为复杂,而且它不像我们直接抓取一个物体那样容易。尤其是弯曲的物体,对机器人来说识别和操作都是一个挑战。
现在,很多创业公司也在开发类似的机器人。最近有个新闻提到,斯坦福大学研发了一款炒菜机器人。它能识别菜肴中的食材,如胡萝卜、青椒、辣椒等,并将它们放入锅中开始炒菜。
2018 年,研究者演示了一个分捡物体的流水线机器人。机器人需要识别传送带上的小石头,把它捡起来,扔进右边的槽里。刚开始时,机器人会犯错误,无法准确地将石头扔进去。这就像小孩子刚开始做事情时,他们可能也会遇到困难。比如当你让孩子把东西放进盒子里时,他们可能会做不对,但一旦完成任务并得到奖励,他们就会学到如何做得更好。在这个案例中,机器人的失败是训练的一部分,通过不断的尝试和奖励,它最终学会了如何正确地识别小石头并将其丢进槽里。
在未来,还会有更多的机器人帮助我们工作,提高我们工作的效率。这种技术的应用,正是推动智能化运营管理的一个重要方向。
要观看上述视频,请访问 B 站《AI 入门》视频合集(链接)。下图为该视频合集中的目录。

挑战
目前,阻碍机器人应用的主要原因是技术还不成熟、硬件成本高、安全性不能保障。
特别是安全性。我们非常担心机器人可能会做出一些危险的行为,甚至伤害到人。如果发生这种情况,责任该由谁来承担?是机器人制造商,还是使用者,或者其他方面的责任人?类似的问题也存在于无人驾驶技术中。目前,虽然无人驾驶汽车在技术上不断进步,但我们仍然不太敢让它们上路。因为一旦发生事故,究竟是由司机负责,还是由汽车制造商或技术提供商承担责任。因此,现阶段,无人驾驶汽车在遇到潜在危险时,通常会选择紧急停车,而不是冒险行驶。这是因为,撞到一个人可能带来无法承担的后果。为了避免风险,许多无人驾驶车辆宁愿停在路上,也不敢贸然前进。这个问题的解决,需要技术、法律和道德等多个方面的共同进步。
| Index | Previous | Next |