感知机
人工智能的起源可以追溯到“感知机”模型。1958 年,Rosenblatt 参考了人脑神经元的信号处理方式,提出了“感知机”模型。
接下来,我们将重点介绍这个感知机模型。它是模仿人类神经元工作原理的第一代人工智能模型,也可以看作是早期的机器学习模型。
大脑模型
生物学家通过研究动物和人的大脑,发现大脑是由很多神经元连接而成的复杂系统。这些神经元之间通过突触进行通信。当一个神经元接收到来自其他神经元的电信号时,它会做出反应。如下图所示。

生物学家发现大脑中的神经元在互相通信中有以下两个特点:
首先,一个神经元对来着不同神经元的信号,有不同的反应:有的反应强烈一些,有的反应弱一些。因此,为了计算一个神经元对来着不同神经元的信号的总反应,我们可以给不同的信号赋予不同的权重。例如,一个信号的权重可能是 0.1,而另一个信号的权重可能是 10。这样就反映了它们对一个神经元的影响不同。
其次,神经元有一个“激活”机制,即:当输入信号较小时,神经元不会产生反应;而当输入超过一定阈值时,神经元才会被激活。
就是通过上述两个看似简单的通信机制,我们的人脑中数十亿个神经元,构成了极其复杂的网络,支持我们的各种智能。
通过几百万年的进化,人类的大脑已经固定了一些功能,比如语言。我们出生后,并不是一张白纸:我们的大脑中已经有了一些预设的结构和机制。因此,孩子们学习语言才会学得那么快。孩子学习语言的过程,很可能就是激活大脑中与语言相关的区域,孩子们就能开始说话了。
而我们大脑的学习过程,就是通过各种经验,不断强化或拆除这些神经元之间的连接,同时调整权重。在这个过程中,神经元之间的连接权重(W)会不断调整。大脑就是通过这样的方式来处理各种信息的。
感知机模型
受到上述大脑神经元模型的启发,科学家提出了模拟人脑神经元的感知机模型。它包括两部分。
第一部分模仿神经元的输入加权机制,对输入进行线性加权。我们有:
- \(x_i\):神经元的输入
- \(w_i\):连接的权重
- \(w_1 x_1 + w_2 x_2 + b\):加权求和
第二部分模仿神经元的“激活”机制。即,当输入信号较小时,神经元不会产生反应;而当输入超过一定阈值时,神经元就会突然激活。为此,我们在模型中引入了对加权和的大小进行阈值判断的条件,即判断 \(w_1 x_1 + w_2 x_2 + b \geq 0\) 是否成立,来模拟这种激活行为。
最终,我们就得到了如下感知机模型,它将判断 \(w_1 x_1 + w_2 x_2 + b \geq 0\) 是否成立。它由两部分组成:输入的线性加权和非线性激活函数输出。它非常简单。首先通过权重(W)和输入(X)进行加权计算,然后把激活函数加到最后。
值得注意的是,我们上面采用的激活函数不是线性增长的,而是一个“阶跃”(Step)函数。它的输出结果要么是 0,要么是 1。因此,它能够进行 0/1 分类的工作,比如判断一封邮件是否是垃圾邮件。随着输入的增长,当某个阈值被突破时,神经元会突然激活并跳跃式增长,输出 1。这就是感知机的基本模型。
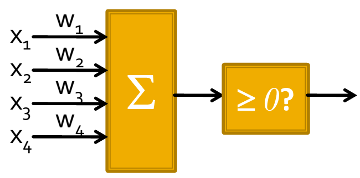
如上图所示,感知机的输出会对输入进行线性加权和,然后通过一个非线性激活函数 \(\sigma(x)\) 进行处理。我们有:
\[y = \sigma (w_1 x_1 + w_2 x_2 + b)\]其中,非线性激活函数 \(\sigma(x)\) 的形式是:当 \(x \geq 0\) 时,输出为 1,否则输出为 0。
因为发明感知机的科学家是电子工程师,所以当时,他们是通过电子电路来实现这些神经元,并将它们连接起来的。随着技术的发展,尤其是计算机的普及,我们现在可以通过计算机来实现。
感知机的模型训练
像我们前面介绍过的那样,作为一个机器学习模型,感知机是通过错误来学习的。
要理解感知机从错误中学习的过程,让我们考虑这样一个几何平面。平面上有两类数据点。感知机的目标是找到一根分割线,将这两类数据完美区分开。分割线的一侧是一类数据,另一侧是另一类数据。这根线被称为判决平面。如下图所示。
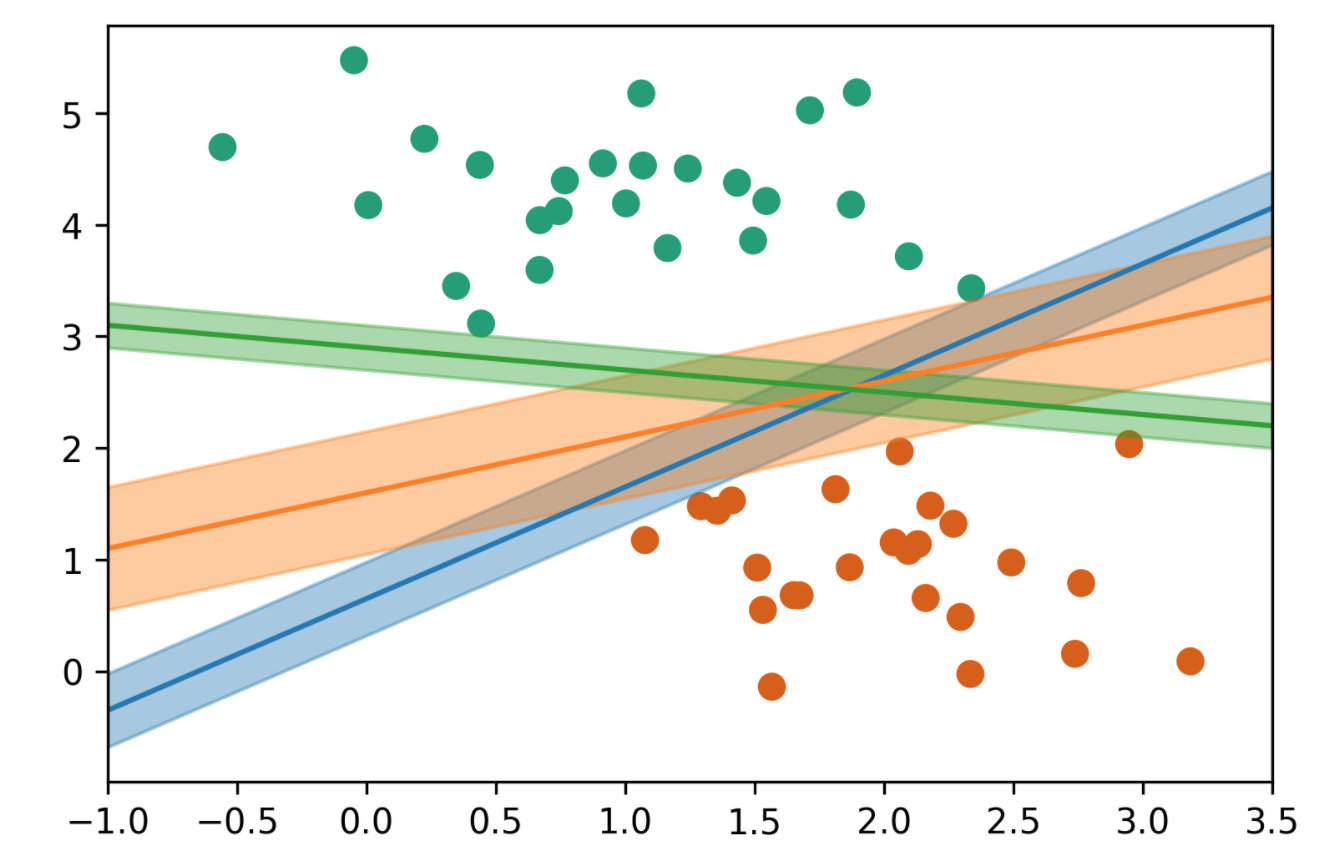
那么,感知机是如何学习到最佳的判决平面的呢?它如果观察到某些数据被错误分类,就会将判决平面朝着这些错误的数据点稍微转过去一点,试图将这些错误分类的数据纳入正确的分类区域。这种旋转操作其实就是调整模型的权重 \(w\),以改变分割平面的斜率和位置。通过这种方式,感知机不断调整,以减少错误的分类。最终,当判决平面调整到一个合适的位置,不再有分类错误时,感知机会将这根线保留下来,也就是保存下模型的参数 \(w\)。这就是感知机模型的工作原理。
因此,感知机的学习过程就是发现错误并调整分类边界,也就是调整模型的参数 \(w\)。
我们的大脑其实也是像这样学习的。我们每天都在自己的各种经验中进行学习。这个过程在我们的大脑中,就是不断调整神经元之间的连接,不断强化或弱化它们连接的权重 \(w\) 的过程。
这就是为什么我们要对错误保持开放态度的原因:因为我们需要在错误中学习。所以,我们需要允许一些失误,这样才会有创新。否则,我们就不能探索新的领域,就会固步自封,变得僵化,成为教条主义的奴隶。
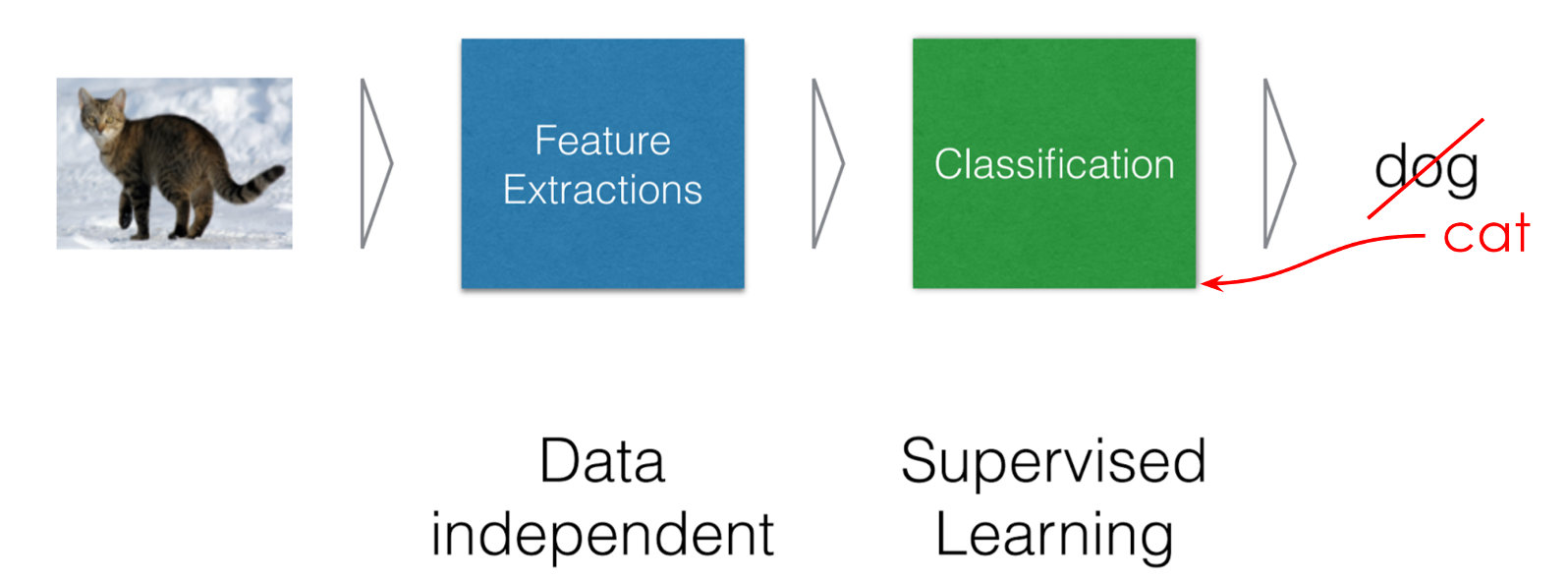
上面的例子是关于二维感知机模型的。它看起来比较直观。对于更高维的数据,我们也可以采用感知机模型,并采用类似的训练方法,只是这些模型更加复杂。例如,对图像分类,一张图片可能包含几百万个像素点。这些像素值输入我们的模型后,我们可以用很多神经元来处理它。这些神经元还可能组成很多层。每一层神经元逐级处理这些信息,最后输出一个结果,告诉我们这是一只狗还是一只猫。
类似的,如果图像显示的是猫,但模型输出的是狗,我们就会告诉模型:你的某些模型权重可能有问题,需要调整。比如说,某些较大的权重应该调小,较小的权重应该调大。模型就会根据这些反馈调整这些权重,然后再次预测。如果仍然是错误的(比如依旧识别为狗),我们就继续调整,直到最终正确识别出猫为止。如下图所示。
这个训练过程完成后,我们会保存下这些调整过的比较好的模型权重(也就是模型参数),之后就可以使用它们进行类似的识别任务。我们常用的人脸识别模型就是这样训练出来的。
因此,感知机模型学习的基本思路就是:发现错误后,调整模型参数,将原来过大的权重调小,过小的权重调大。如果最终正确,就保留当前的权重,不再调整。这也是目前常用的人工智能模型训练的基本过程。
作为一种提出得很早的机器学习模型,感知机的缺陷也很明显。首先,它的输出非常简单,要么是 0,要么是 1,这限制了它的应用范围,尤其是在需要更细致输出的场景中。其次,单个感知机的能力有限。我们后面介绍的神经元网络会改进这些问题。
| Index | Previous | Next |